不同软件的坐标系对比
不同软件的空间坐标系有些许区别
首先是左手系,右手系的区别,其次是哪个轴为 up 轴的区别(一般不使用 x 轴为 up 轴)
| 软件 | Z-UP | Y-UP |
|---|---|---|
| left handed | unreal | unity, c4d, zbrush, directx |
| right handed | cry engine, source engine, blender, 3ds max, autocad, sketchup | godot, maya, houdini, substance painter, opengl |
unreal 是独特的存在,使用左手坐标系,Z-UP
移动

rgb 3 个颜色对应 xyz 3 个轴
x 轴指向人物前方,对应 +forward -backward y 轴指向人物右方,对应 +right -left z 轴指向人物上方,对应 +up -down
3 个轴的正方向都非常符合直觉
旋转
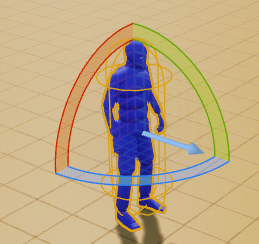
rgb 分别对应围绕 xyz 3 个轴的旋转
理论上左手系应该使用左手法则进行旋转,大拇指指向箭头方向,手指方向为旋转正方向
而 ue 为了保持直觉性,使用不同的方式
| 轴 | 名称 | 正向旋转 | 法则 |
|---|---|---|---|
| x | roll | 人物向右手侧倒 | 右手 |
| y | pitch | 人物向上看 | 右手 |
| z | yaw | 人物向右转 | 左手 |
euler family
欧拉角存在一个解析顺序的问题, xyz 顺序,意味着以世界坐标系轴为基准(外旋) 先绕 x 轴旋转,再 y 轴,再 z 轴 x 只影响本身,y 轴旋转影响了之前 x 轴的旋转,z 轴旋转影响了 x y 轴的旋转
xyz 有 6 种可能的顺序
- yxz
- zxy
- xyz
- zyx
- xzy
- yzx ue使用 xyz 顺序
万向锁
欧拉角存在万向锁的问题,即中间轴旋转90度之后,剩下两个轴的旋转效果相同
以xyz为例,y=90,此时旋转x 和 z效果相同

所以对不同的欧拉角顺序,推荐使用的方法是锁定中间轴为0,用 1轴表示旋转,3 轴表示朝向
比如在骨架中每个骨骼的xyz轴向,尽量不使用y轴 x 轴和骨骼方向一致,z 轴表示骨骼沿关节的旋转
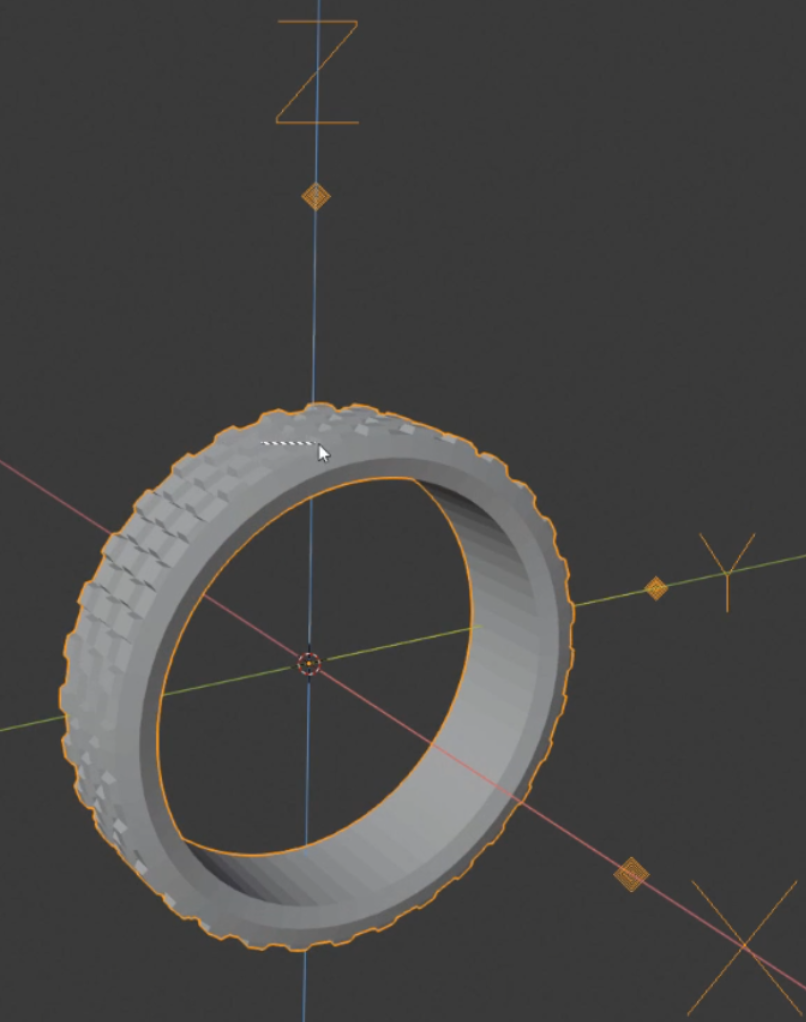 比如表示轮胎的行为
比如表示轮胎的行为